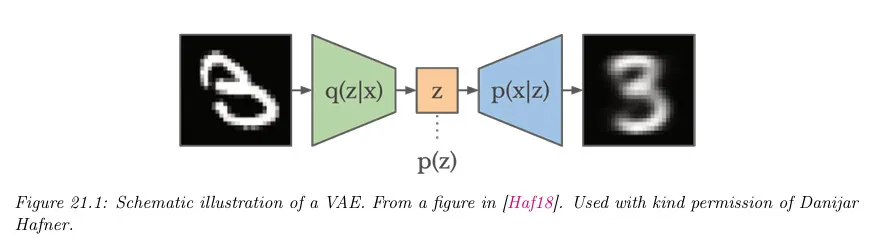
Variational Auto Encoder(VAE)
Auto Encoder(AE)는 결정론적인 모델이라 생성 모델로 쓰기에는 결과가 좋지 않았음. 더 나은 데이터 생성을 결과를 얻기 위해 AE를 확률적 버전으로 구성한 것이 VAE라고 볼 수 있다.
AE를 확률론적 버전으로 구성할 때 encoder를 단순히 로 구성하면 생성 결과가 좋지 못하기 때문에 와 같이 조건부 형태로 구성 한다. 이때 의 posterior를 계산하기 위한 marginal likelihood 를 직접 계산하는 것이 어렵기 때문에 Variational Inference을 사용하여 계산하기 쉬운 (일반적으로 가우시안인) 를 정의하고 KL divergence로 이 분포를 와 가깝게 만드는 방법을 사용함. (물론 가우시안인 아닌 를 가우시안인 로 근사하는 것은 한계가 있다. 이것이 Variational 방법의 한계 중 하나이다.)
최종적으로 VAE의 encoder는 의 형식을 갖고 decoder는 의 형식을 갖게 됨.
VAE의 손실 함수는 여러가지 형태로 기술할 수 있지만 간단히 정리하면 다음과 같다.
여기서 는 reconstruction error로 encoder가 생성한 잠재 변수 를 기반으로 원본 를 얼마나 잘 재구성하는지를 측정하는 것으로 디코더의 성능을 평가하는 부분으로 볼 수 있다. 일반적으로 cross entropy를 사용함.
는 가 근사하려는 에 얼마나 가까운지를 측정하는 것으로 인코더의 성능을 평가하는 부분으로 볼 수 있다. 일반적으로 를 사용. 가 근사하려던 원래 분포가 였는데 KL divergence에 가 쓰이는 이유는 VAE의 손실 함수 유도과정 때문이다. 아래 참고 자료의 <시각적 이해를 위한 머신러닝> 참조.
참고로 VAE의 encoder가 출력하는 잠재 변수 의 평균 과 분산 을 이용하여 KL divergence를 다음과 같이 계산할 수 있다. 아래 식에서 는 잠재 변수의 차원이다.
-VAE
VAE의 단점은 생성된 이미지가 blur 이미지가 되는 경향이 있다는 것이다. 이것을 보완하기 위해 여러 방법을 사용할 수 있지만, 간단한 방법은 KL 항에 페널티를 감소시켜서 모델을 결정론적 autoencoder에 더 가깝게 만드는 것이다.
여기서 는 reconstruction 에러(negative log likelihood)이고 은 KL regularizer이다. 이것을 -VAE 목적이라고 한다. 을 설정하면 표준 VAEs에서 사용되는 목적을 복구한다. 을 설정하면 표준 autoencoder에서 사용되는 목적을 복구한다.
를 0에서 무한대로 변화시키면 rate distortion curve의 다양한 지점에 도달하게 된다. 이러한 점들은 reconstruction error(distortion)과 입력에 관한 잠재에 저장된 정보의 양(코드에 해당하는 rate) 사이의 다양한 tradeoff를 만든다. 을 사용하면 각 입력에 대해 더 많은 bit를 저장하므로 reconstruct 이미지는 덜 blur가 되고, 을 사용하면 더 압축된 표현을 얻는다.
InfoVAE
VAE를 학습하는데 디코더가 강력하면 잠재 코드가 무시되는 경향이 있고 데이터 공간과 잠재 공간에서 KL 항 사이의 불일치 때문에 빈곤한 posterior 근사를 하는 경향이 있다. 다음 형식의 일반화된 목적을 사용하여 어떤 정도로 이 문제를 수정할 수 있다.
여기서 은 와 사이의 상호 정보량 에 가중치를 얼마나 부여할지 제어한다. 는 -공간 KL과 -공간 KL 사이의 tradeoff를 제어한다. 이것을 InfoVAE 목적이라고 한다. 과 을 설정하면 표준 ELBO를 복구한다. 불행히 이 방정식의 목적은 MI 항이 까다롭기 때문에 작성한대로 계산할 수 없다. 이에 대한 내용은 생략. 더 자세한 내용은 참고 자료의 <PML: Advanced Topic> 참조.
Sample Code
Model
간단한 VAE 모델 구성. 아래 예시 코드를 보면 평균과 log 분산을 계산을 통해 구하지 않고 별도의 nn.Linear를 통과시켜서 구하도록 구성되어 있다. 이렇게 하면 두 레이어가 이후의 reparameterize 연산에 연결되어서 각각 평균과 log 분산을 학습하도록 된다고 하는데, 사실 납득은 잘 안 감.
추가로 잠재 변수 z를 z까지 신경망을 구성하지 않고 encode 까지의 신경망의 평균과 분산을 이용해서 reparameterize로 구한다.
# VAE 모델 정의
class VAE(nn.Module):
def __init__(self):
super(VAE, self).__init__()
self.fc1 = nn.Linear(784, 400)
self.fc21 = nn.Linear(400, 20) # 평균을 위한 레이어
self.fc22 = nn.Linear(400, 20) # 로그 분산을 위한 레이어
self.fc3 = nn.Linear(20, 400)
self.fc4 = nn.Linear(400, 784)
def encode(self, x):
h1 = F.relu(self.fc1(x))
return self.fc21(h1), self.fc22(h1)
def reparameterize(self, mu, logvar):
std = torch.exp(0.5*logvar)
eps = torch.randn_like(std) # 크기가 std인 평균 0, 표준편차 1의 가우시안
return mu + eps*std
def decode(self, z):
h3 = F.relu(self.fc3(z))
return torch.sigmoid(self.fc4(h3))
def forward(self, x):
mu, logvar = self.encode(x.view(-1, 784))
z = self.reparameterize(mu, logvar) # encode의 평균과 분산을 이용해서 reparameterize로 잠재변수 z를 구한다.
return self.decode(z), mu, logvar
Python
복사
Objective
VAE의 손실 함수
# 손실 함수
def loss_function(recon_x, x, mu, logvar):
# 원본 입력과 reconstruction 사이의 binary cross entropy
BCE = F.binary_cross_entropy(recon_x, x.view(-1, 784), reduction='sum')
# q(z|x)와 p(z)의 KL divergence. 잠재 변수 z의 평균과 분산을 이용해서 구한다.
KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp())
return BCE + KLD
Python
복사
Train, Test
학습과 테스트 코드
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
from torchvision.utils import save_image
import os
# 데이터셋 로드 및 전처리
transform = transforms.Compose([
transforms.ToTensor(),
])
train_dataset = datasets.MNIST(root='./data', train=True, download=True, transform=transform)
test_dataset = datasets.MNIST(root='./data', train=False, download=True, transform=transform)
train_loader = DataLoader(train_dataset, batch_size=128, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=128, shuffle=False)
# 'results' 디렉토리가 없으면 생성
if not os.path.exists('results'):
os.makedirs('results')
# 모델, 옵티마이저 설정
model = VAE()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
# 학습 함수
def train(epoch):
model.train()
train_loss = 0
for batch_idx, (data, _) in enumerate(train_loader):
optimizer.zero_grad()
recon_batch, mu, logvar = model(data)
loss = loss_function(recon_batch, data, mu, logvar)
loss.backward()
train_loss += loss.item()
optimizer.step()
if batch_idx % 100 == 0:
print(f"Train Epoch: {epoch} [{batch_idx * len(data)}/{len(train_loader.dataset)} ({100. * batch_idx / len(train_loader):.0f}%)]\tLoss: {loss.item() / len(data):.6f}")
print(f'====> Epoch: {epoch} Average loss: {train_loss / len(train_loader.dataset):.4f}')
# 테스트 함수
def test(epoch):
model.eval()
test_loss = 0
with torch.no_grad():
for data, _ in test_loader:
recon, mu, logvar = model(data)
test_loss += loss_function(recon, data, mu, logvar).item()
test_loss /= len(test_loader.dataset)
print(f'====> Test set loss: {test_loss:.4f}')
# 학습 및 테스트 실행
for epoch in range(1, 11):
train(epoch)
test(epoch)
with torch.no_grad():
sample = torch.randn(64, 20)
sample = model.decode(sample).cpu()
save_image(sample.view(64, 1, 28, 28), f'results/sample_{epoch}.png')
Python
복사
•
아래는 테스트 결과. 10번 정도의 epoch으로는 학습이 크게 되지 않기는 하지만 10번의 결과가 좀 더 선명해 보임
•
epoch 1
•
epoch 10