
Integral probability metrics
•
integral probability metric(IPM)은 의 측면에서 두 분포 사이의 다이버전스를 계산한다. 다음과 같이 정의된다.
•
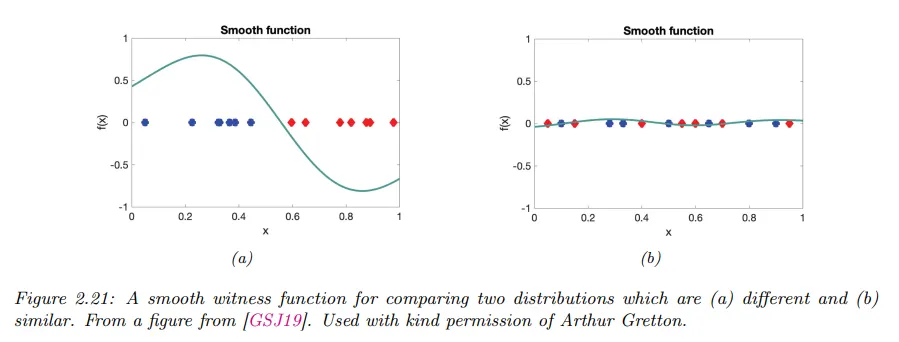
여기서 는 smooth 함수의 클래스이다. 두 기대값 사이의 차이를 최대화하는 함수 를 witness function이라 부른다. 아래 그림 참조.
•
함수 클래스 를 정의하는 몇 가지 방법이 있다.
◦
한 가지 접근은 양의 정부호 커널 함수로 정의된 RKHS를 사용하는 것이다. 이것은 maximum mean discrepancy(MMD, 최대 평균 불일치)로 알려진 방법을 발생시킨다.
•
또 다른 방법은 bounded Lipschitz 상수를 갖는 함수들의 집합으로 를 정의하는 것이다. 즉 . 여기서
•
이 경우에 IPM은 Wasserstein-1 distance와 같아진다.
Maximum mean discrepancy (MMD)
•
maximum mean discrepancy(MMD)는 두 분포의 샘플을 사용하여 불일치 측정값 를 정의하는 방법이다.
◦
샘플은 고차원 입력을 다룰 수 있는 양의 정부호 커널을 사용하여 비교된다.
◦
이 접근은 2-샘플 테스트를 정의하고 암시적 생성 모델을 훈련하는데 사용될 수 있다.
MMD as an IPM
•
MMD는 다음 형식의 적분 확률 메트릭(integral probability metric, IPM)이다.
◦
(여기서 은 supremum의 약자로 집합의 상한(upper bound)의 최소값을 나타낸다. 이것의 반대는 infimum의 약자인 가 있다. 이것은 집합의 하한(lower bound)의 최대값을 나타낸다.)
•
여기서 는 양의 정부호 커널 함수 로 정의된 RKHS이다. 이 집합의 함수를 기저 함수의 무한 합으로 표현할 수 있다.
•
witness 함수 의 집합을 이 RKHS의 단위 공 안에 있도록 제한한다. 따라서 .
•
기대의 선형성으로 다음을 갖는다.
•
여기서 는 분포 의 kernel mean embedding이라고 한다. 따라서
•
내적을 최대화하는 단위 벡터 는 feature 평균의 차이와 평행하기 때문이다.
•
직관을 얻기 위해 을 가정하자.
◦
이 경우에 MMD는 두 분포의 첫 두 모멘트의 차이를 계산한다. 이것은 모든 가능한 분포를 구별하는데 충분하지 않다. 그러나 가우시안 커널을 사용하는 것은 두 개의 무한하게 큰 feature 벡터를 비교하는 것과 동등하므로 두 분포의 모든 모멘트를 효과적으로 비교할 수 있다.
◦
사실 non-degenerate 커널을 사용하면 이면 임을 보일 수 있고 그 역도 성립한다.
Computing the MMD using the kernel trick
•
이 섹션에서 두 개의 샘플 집합 (여기서 이고 이다)이 주어졌을 때 방정식 을 실제로 어떻게 계산하는지 설명한다.
◦
와 를 두 분포의 커널 평균 임베딩의 경험적 추정치라고 하자. 그러면 제곱 MMD는 다음과 같이 주어진다.
•
위 방정식이 feature 벡터의 내적만 포함하기 때문에 커널 트릭을 사용하여 다음처럼 재작성할 수 있다.
Linear time computation
•
MMD는 계산에 시간이 걸린다. 여기서 은 각 분포의 샘플들의 수이다.
◦
시간이 걸리는 unnormalized mean embedding(UME)라고 부르는 다른 테스트 통계가 제시되었다. 핵심 아이디어는 다음을 평가하는 것이다.
•
테스트 위치 집합 은 와 사이의 차이를 감지하는데 충분하다. 따라서 (제곱) UME를 다음처럼 정의한다.
•
여기서 는 경험적으로 시간에 추정될 수 있다. 그리고 도 유사하다.
•
UME의 normalized 버전은 NME라고 한다.
◦
NME를 위치 에 관해 최대화하면 테스트의 통계적 검정력을 최대화하고 와 가 가장 차이나는 위치를 찾을 수 있다.
◦
이것은 고차원 데이터에 대해 해석 가능한 2-샘플 테스트를 제공한다.
Choosing the right kernel
•
MMD(와 UME)의 효율성은 커널의 올바른 선택에 전적으로 의존한다. 1차원 샘플을 구별하는 것에서도 커널의 선택은 매우 중요하다.
◦
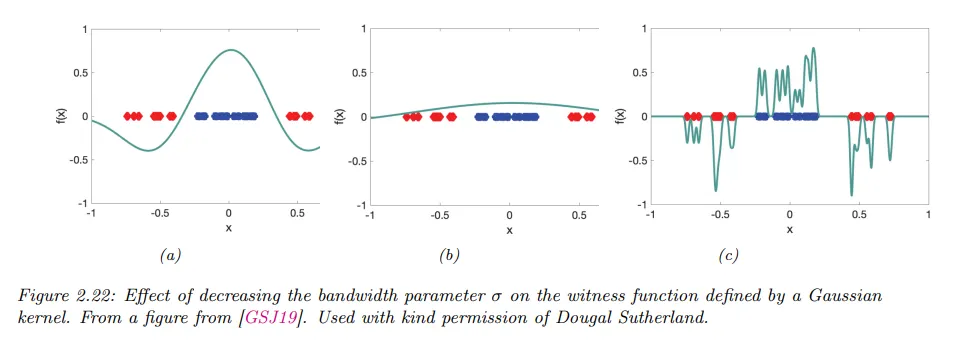
예컨대 가우시안 커널 를 고려하자. 를 변화시키는 것의 효과는 1차원 샘플의 서로 다른 2개의 다른 집합을 구별하는 능력의 측면에서 아래 그림에 나타난다.
◦
다행히 MMD는 커널 파라미터에 관해 미분 가능하다. 따라서 테스트의 검정력을 최대화하기 위해 최적의 를 선택할 수 있다.
•
이미지와 같은 고차원 데이터에 대해 pre-trained CNN 모델을 저차원 feature를 계산하는 방법으로 사용하는 것은 유용할 수 있다.
◦
예컨대 를 정의할 수 이다. 여기서 는 ‘inception’ 모델과 같은 CNN의 어떤 은닉 레이어이다.
◦
결과 MMD 메트릭은 kernel inception distance라고 한다. 이것은 Frechet inception instance와 유사한데, 통계적 속성이 더 우수하고 인간의 인지 판단과 더 나은 상관관계를 보인다.
