
Camera Projection Matrix
Camera Projection Matrix는 3d 점을 카메라 이미지 평면에 투영하기 위한 변환을 나타내는 행렬로 일반적으로 다음과 같이 표현된다.
여기서 는 projection matrix이고, 는 intrinsic matrix이고, 은 rotation matrix이고, 는 translation vector이다.
카메라가 이동하거나 회전하면 카메라 투영 행렬을 다시 계산해야 한다는 점에 유의하라.
3d 점 2d 이미지 평면의 점 에 투영하기 위해 우선 homogeneous(동차) 좌표계로 확장하여 로 나타낸 다음, 이를 camera projection matrix와 곱해서 다음과 같이 2d homogeneous 좌표 를 얻는다.
그 다음 homogeneous 좌표 를 아래와 같이 정규화하여 최종적으로 이미지 평면의 점 을 얻는다.
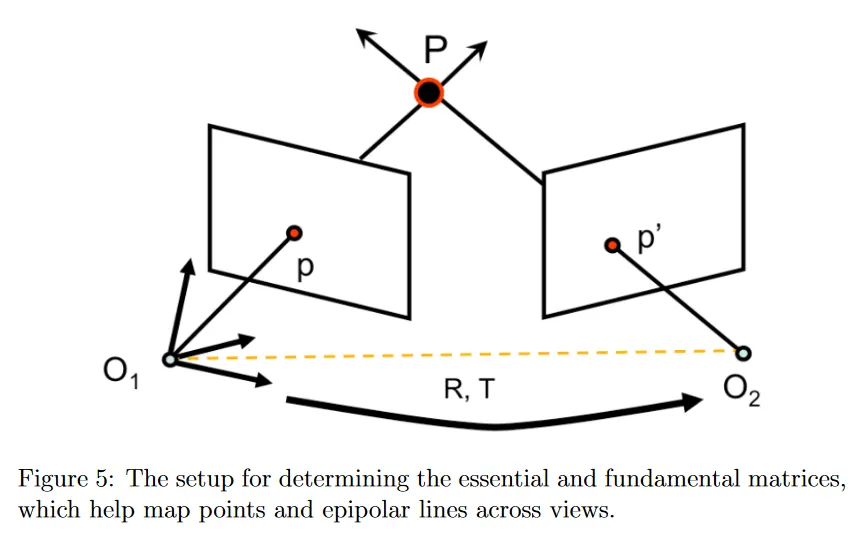
epipolar geometry framework에서 첫 번째 카메라를 기준계로 설정하고 두 번째 카메라가 첫 번째 카메라에 대해 의 회전과 의 평행이동된 것이라고 가정하면, 두 카메라의 Camera Projection Matrix 를 다음과 같이 정의할 수 있다.
첫 번째 카메라가 기준계이므로 원점에 위치하고 방향이 월드 좌표계와 일치한다. 첫 번째 카메라의 위치를 두 번째 카메라로 평행이동 시키는 는 baseline 벡터가 되며, 따라서 의 크기는 baseline의 길이가 된다. 가 baseline 벡터이므로 는 3d점 와 두 카메라의 원점 를 포함하는 epipolar plane 위에 놓이게 된다.
카메라 투영 행렬의 개념은 위와 같지만, 실제로는 투영된 2d 점의 위치를 이용하여 3d 점의 위치를 거꾸로 계산하는데 관심이 있다. 이것은 Triangulation을 이용하여 계산할 수 있다. 다음 페이지 참조. AI/ Triangulation
